

��ͨӍ������")
�C�����ⲿ�S���÷�")
KUKA�C����6 �S��λУ��(zh��n)������ EMT��
һ���քӠ�B(t��i)T1�����S����(bi��o)ϵ�����C����1 ��6 �S�քe�Ƅӵ���ԭʼ���c������Ŀ�yÿ���S�ϵăɂ���λ�^��ȱ��Ҫ����(zh��n)��

���� ��EMT ���b���S1 ��У���λ��(n��i)������һ���B�ӵ��C���˵����ϵ�X32 ��ڡ�

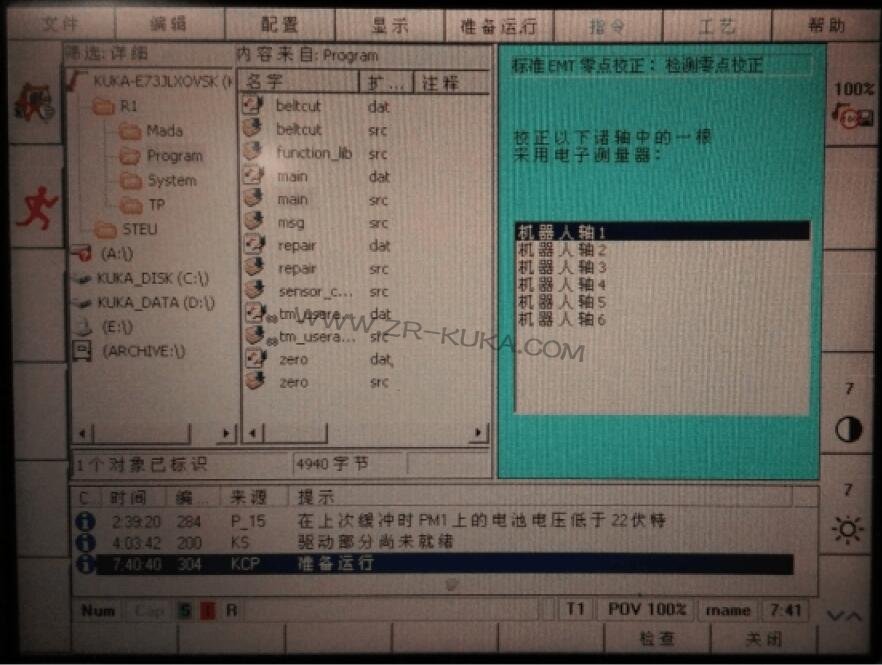
��������KUKA�����ֱ��������x�����²ˆ��M����λУ��(zh��n)ģʽ��
1. ������M
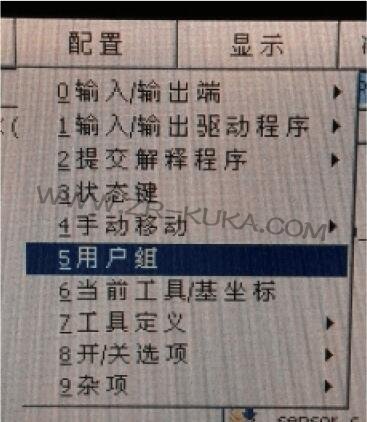
2. �x���ң��ܴakuka
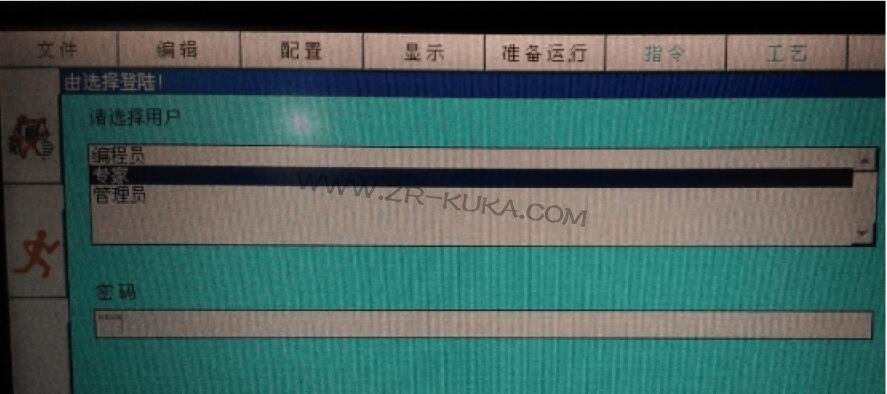
3. �x���(zh��n)���\�У����cУ������Ӝy����
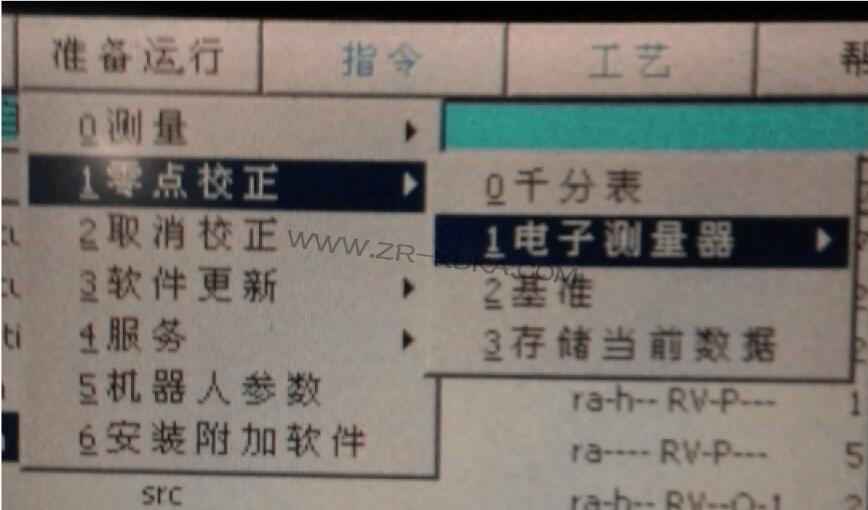
4. ��(bi��o)��(zh��n)���z�����c��
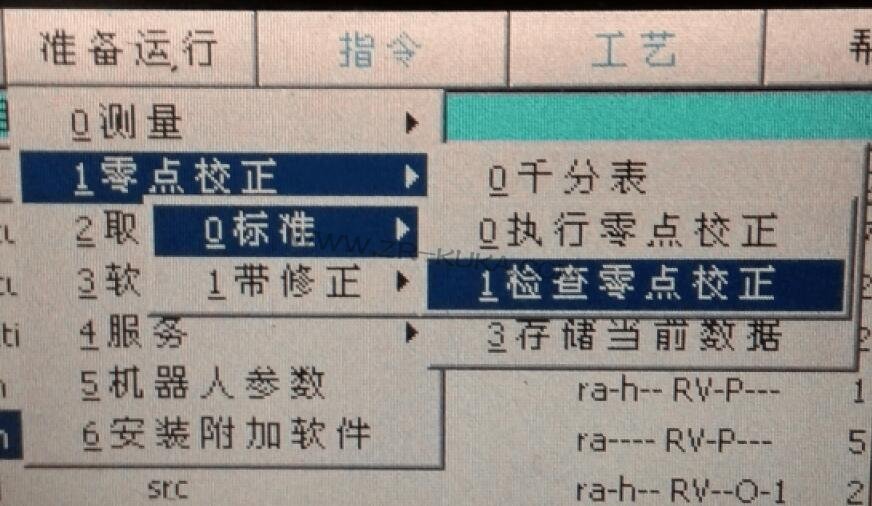
5. �x��C�����S1�����·�����Ϣ��գ����ְ�ס�ֱ�������(q��)�Ӱ��I�����(q��)�ӈD��(bi��o)“I׃”�ɾGɫ����”�z��“���o����(y��ng)��ܛ�I���ڕ����F(xi��n)��(zh��n)��;w�֘ӡ��˕r�S1 �ѽ�(j��ng)�_ʼ�ӣ������^�쵽EMT�ϵăɂ��Gɫָʾ�����Ƀɂ�ȫ��׃?y��u)�ֻ�? ���������S�����һ��У��(zh��n)�Y(ji��)�����@�r���У��(zh��n)����λ�c�F(xi��n)��λƫ���С����ֱ�ӕ��@ʾ”�S1 ��λУ��(zh��n)�Y(ji��)��“�����У��(zh��n)����λ�c�F(xi��n)��λƫ��ޣ��t�����҂�(c��)��Ϣ���@ʾУ��(zh��n)ǰ��Ĕ�(sh��)��(j��)��e���������a���aֵ��ͽǶȲ��Ҫ�x��”�惦”����������λУ��(zh��n)��
6. ��EMT�Ƅӵ��S2 ��У���λ��(n��i)����һ����Ȼ�B�ӵ��C���˵����ϵ�X32 ��ڣ����҂�(c��)��Ϣ���x��C�����S2�������������E���S2 �M����λУ��(zh��n)
7. ���Ό����µ�4 ���S�M����λУ��(zh��n)
�ġ� ���^��(zh��n)�ꮅ���ք�ģʽ�����\��“�S��”�����C���˴S��λ���^���г̺�λ���Ƿ���������������֮�����\���������ք����ٻ�HOME �c���^���г̺�λ���Ƿ����������������t�M���^�Ϝyԇ��
�塣 ���M����λУ��(zh��n)����KR150��C���ˣ���ô�ڽ��ϵ�y(t��ng)늿ع���������x��“����KR150�C����”���ڙC����KCP���x��main �����Ԅӣ����ӣ��ȴ��Ԅӌ�����������Ƿ���������һ���������t������λУ��(zh��n)�Y(ji��)����