

��ͨӍ������")
�C�����ⲿ�S���÷�")
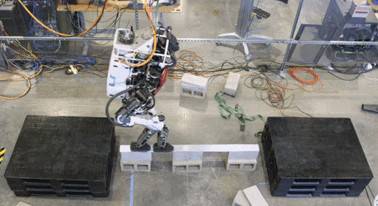
������ʿ�D������Atlas�C�����֎�����“�±���”���������������c�C���J֪�о�����IHMC�������һ��Atlas“�^��ľ��”��ҕ�l���@Ҳ��ζ��Atlas�ɹ�����˸��y�ȵ����ߌ�
����ҕ�l�п��Կ�����Atlas�挦�u�β�ͣ�Ĵu�K��С�������سɹ�ͨ�^��

���������ɴu�K�ѯB���ɵĪMխ��ľ��Ҳ������ش������С�
����������֪����(d��ng)��ͨ�������@Щ���εĕr���dz�����҂���ƽ��������Ҳ���Ƕ��P(gu��n)��(ji��)����ϳ̶ȡ����ڙCе�\�ӵęC���ˁ��f���@헹����@�ø�������(zh��n)����(j��)Ϥ����IHMC���¿��ơ���֪��Ҏ(gu��)���㷨��֧���£���ʿ�D����Atlas��������˷��@�Ώ�(f��)�s���Σ���������Ҏ(gu��)���ڪMխ�ĵ��������ߡ�
�����ھ��w�����ϣ�Atlas��ͨ�^�������_����֪���Σ����I(y��)�C�����S����ͬ�r�L�Ƴ����P(gu��n)ƽ��^(q��)��ĵ؈D���˕r·��Ҏ(gu��)���㷨����ָ��(d��o)�C���˵����EҎ(gu��)����r����������؏����c�ߵ��O(sh��)���õ�Ŀ��(bi��o)�K�c��
����IHMC���о��ˆT��ʾ�����I(y��)�C���˾S����“�Mխ�ĵ��Ό��ڙC���ˁ��f�����y�������Ҫ��һЩ�p��‘����’�IJ��E��m.zzjykji.com�������y�P(gu��n)��(ji��)���\�ӷ����������ġ����Ԯ�(d��ng)һֻ�_����һֻ�_ǰ��r����Ҫ�O(sh��)Ӌһ��С��֧�ζ�߅�Ρ�”
�������Ԟ������Ӳ����ijɹ��ԣ����������DŽ�������ƽ��������ʹ�ÙC���˸��õ�ͨ�^�P(gu��n)��(ji��)�\��������ߵijɹ��ʡ�
����������֪����ʿ�D����һ�����`���\�ӵ��p��C�����о�����ģ���IHMC�о�Ŀ��Ҳ��ϣ���p��C������·�����ˣ��Ķ����Ժ���̘I(y��)��(y��ng)����ü��g(sh��)���A(ch��)�����ǏĮ�(d��ng)ǰ���о��͌��������x�@��Ŀ��(bi��o)��Ȼ�к��h�ľ��x��