
̽�y(c��)���ɹ���ꑻ���")
���C(j��)�����O(sh��)��ͨӍ������")
�����I(y��)�C(j��)�����ⲿ�S���÷�")
��������C(j��)����������҂����҄�(w��)����������҂��܂����˺����ˣ�����������Ҫ�p�֡�����ʹ���p�ֱ��҂������Ҫ���y�ö࣬�����@��(g��)�C(j��)���˿���ϵ�y(t��ng)�ڇLԇ��ͬ�ӵ�����֮ǰ����(hu��)������W(xu��)��(x��)��
�����@��һ�(xi��ng)��(l��i)����˹������W(xu��)�����d��У���о�������������뷨�����ǽ���һ��(g��)�p�֙C(j��)���ˣ����Ǻ�(ji��n)�ε�(chu��ng)��һ��(g��)ϵ�y(t��ng)��ʹ�C(j��)���˟o(w��)��˼���Ϳ������Ⲣ��(zh��)���c���һ�ӵIJ�����

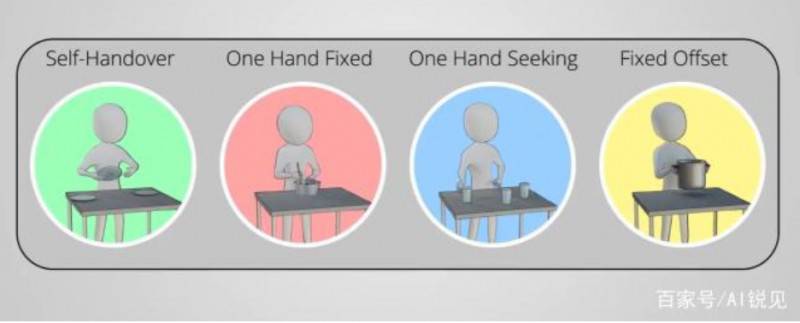
�������磬��(d��ng)����Ҫ���_һ��(g��)���^�r(sh��)����Ҫ��һֻ��ץס���������Ƶ��m��(d��ng)?sh��)�λ�ã�Ȼ����һֻ��ץס�w�Ӳ����o����?j��n)Q�_����
�������@�N�������p�ք�(d��ng)���У������ஔ(d��ng)��Ą�(d��ng)�����E�������ڬF(xi��n)��Ҫ��C(j��)�������������@�����Ƿdz����y�ġ����ǣ��@��(g��)�C(j��)������Ȼ���Դ����˽��ʲô���@�N��r���M(j��n)���@�N�ٿv�����M������ȥģ������
�����о��ˆT���������\(y��n)��(d��ng)���O(sh��)����ˈ�(zh��)�и��Nģ�M���ճ��΄�(w��)������B���ӡ����_��������������Ė|���ȵȡ������@Щ��(sh��)��(j��)�����ֵķ��������Ļ���(d��ng)��ʽ�ȵȶ���(hu��)���C(j��)���W(xu��)��(x��)ϵ�y(t��ng)��֪������(f��)˼����
������Y(ji��)���ķN��������ֲ���(d��ng)�������ҽ��ӣ�һ�̶ֹ����p�ְ��ƣ�һ���ҡ��C(j��)���˰��@һ֪�R(sh��)�\(y��n)�õ������У���(du��)���������(d��ng)���M(j��n)�н�ጡ�
��������ܕ�(hu��)�J(r��n)�飬��(d��ng)һ��(g��)���h(yu��n)�̿���һ��(g��)�C(j��)���˕r(sh��)������(hu��)��(zh��n)�_�ط�ӳ���@��(g��)�˵Ą�(d��ng)�����ڜy(c��)ԇ�У��C(j��)�����@����ֻ��һ��(g��)�������S����(d��ng)���Ǹ��������������ġ�
����������_���^�����ӣ���(d��ng)�҂����_���^�ĕr(sh��)���҂�����ø������ر���һ߅�ķ�(w��n)������������Ҫ�ù��ӵ����ƻ�ȥ����(l��i)��(du��)����һֻ�ֵ�������
���������ԇ�D�h(yu��n)�̲����C(j��)���ֱۣ�һֻ�ֿ��ܕ�(hu��)�ѹ��^����һֻ�����ó���(l��i)��������?y��n)���һֻ�֛](m��i)������ץ��ס����
�����о��ˆT��(chu��ng)����ϵ�y(t��ng)�܉��R(sh��)�e�����ķN�О�Εr(sh��)�l(f��)��������ȡ���P(gu��n)��ʩ���@��ζ������(d��ng)��������ˮͰ�r(sh��)��Ҫ���R(sh��)����ֻ�ֱ۹�ͬ������
�����������_�������r(sh��)�����I(y��)�C(j��)�����S�������������w���ֱ��ṩ�~�����������ֻʹ��һֻ�ֵ���r�£�ϵ�y(t��ng)Ҳ֪�����Zδʹ�õ��ֵ��\(y��n)��(d��ng)����������YԴ(�o(w��)Փ�����w�\(y��n)��(d��ng)߀��Ӌ(j��)������)��I(xi��n)�o�������֡�
������(d��ng)Ȼ����(k��)���C(j��)�������@һ�ж��������������(l��i)��ɵģ���������О����ڱ�����(qi��ng)���C(j��)���˾S�������Ҳ��H�H�Ǻ�(ji��n)�εęC(j��)е��(f��)�ơ�
�����C(j��)������������@Щ�΄�(w��)߀�к��L(zh��ng)��·Ҫ�ߣ��������@�ӵ��о����@�(xi��ng)�����Ļ��A(ch��)���ڙC(j��)���ˇLԇ�����һ���Ƅ�(d��ng)֮ǰ�������HҪ�˽����������Ƅ�(d��ng)�ģ�߀Ҫ�˽��ʲô����?c��)�ijЩ��r����ijЩ���飬����߀Ҫ�˽�������Ҫ���c(di��n)������Ҏ(gu��)���ֵ�·�����x���ձ�λ�õȡ�