
���ˮa(ch��n)�I(y��)�Ї�����(zh��ng)��ǰҹ �l��")
е��C4ʾ�̾������@ʾ�Q��")
�����ŷ�늙C(j��)����(d��ng)����")
HR20-1700-C10�C(j��)�����ք�(d��ng)����ʾ��
������Ҫ�v���ք�(d��ng)����HR20-1700-C10 ϵ�ЙC(j��)���˵����P(gu��n)��(n��i)�ݣ�����(bi��o)ϵ�Ķ��x�����O(sh��)�ã��ք�(d��ng)�����ķ������ٶ��O(sh��)�ü��ք�(d��ng)�����r(sh��)����B(t��i)�Ĵ_�J(r��n)��ͨ�^���µČW(xu��)��(x��)���Ñ���(y��ng)�����ք�(d��ng)�����ķ����Ϳ��g����(bi��o)ϵ�đ�(y��ng)�ã�����Ҫ���ǣ��Ñ���Ҫͨ�^��(sh��)�H�IJ������ܸ��쾚�����ք�(d��ng)������

4.1 �ք�(d��ng)���������M(j��n)��
���ȣ�����Ñ����@ȡ���ƙ�(qu��n)�ޣ���D4.1 ��Administrator �Ñ���ע���^������Ϸ��Ġ�B(t��i)�@ʾ�ڡ��^���B(t��i)�@ʾ���Ƿ���ք�(d��ng)��B(t��i)��߀Ҫע���Ƿ����ŷ���(b��o)����B(t��i)�����ٶșn�Ρ�
�D4.1 ʾ�̺���ߙ�(qu��n)����
�_�J(r��n)��B(t��i)�����D(zhu��n)耳ף�����ʾ�̺��ϵ�Position �I���t�M(j��n)���ք�(d��ng)������B(t��i)����D4.2����
HR20-1700-C10�C(j��)���˾����փ�(c��)

�D4.2 �ք�(d��ng)����
4.2 ����(bi��o)ϵ���ٶ��O(sh��)��
����(bi��o)ϵ�O(sh��)��
��HR20-1700-C10 ϵ�ЙC(j��)����ϵ�y(t��ng)���O(sh��)�������N����(bi��o)ϵ�����P(gu��n)��(ji��)����(bi��o)ϵ����������(bi��o)
ϵ�Լ���������(bi��o)ϵ��ע���״��M(j��n)���ք�(d��ng)����Ĭ�J(r��n)���P(gu��n)��(ji��)����(bi��o)ϵ���Ɍ�(du��)����(bi��o)ϵ�M(j��n)���ГQ��
��ʾ�̕r(sh��)߀Ҫע������нǶ��cλ�õ���Ϣֵ��
����(bi��o)ϵ���x
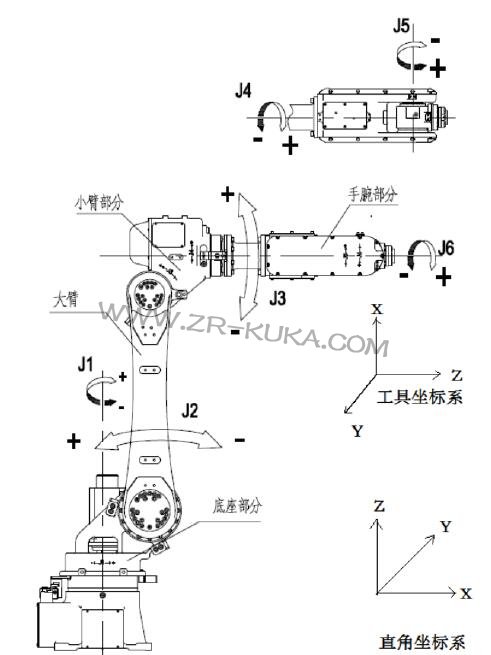
�D4.3 �C(j��)��������(bi��o)ϵ
�P(gu��n)��(ji��)����(bi��o)ϵ�����@���P(gu��n)��(ji��)�D(zhu��n)��(d��ng)����ؓ(f��)������D4.3��ʾ�����c(di��n)λ�Õr(sh��)�� 5�S����ؓ(f��)��
ֱ������(bi��o)ϵ���̶�����(d��ng)����D4.3��ʾ��ԭ�c(di��n)��C(j��)���˵���λ�á�
��������(bi��o)ϵ���S�ˑB(t��i)�D(zhu��n)��(d��ng)�����x��D4.3��ʾ��δ�����ߕr(sh��)��ĩ�˷��m����λ�Þ���ԭ�c(di��n)λ�ã���ֱĩ�˷��m���ⷽ��?y��n)�Z�S������
�ٶ��O(sh��)�ã�����0.1%—100%������(n��i)�����Ñ��M(j��n)���O(sh��)�á�
4.3 �ք�(d��ng)����
HR20-1700-C10�C(j��)���˾����փ�(c��)

�D4.4 �P(gu��n)��(ji��)����(bi��o)ϵ�@ʾ����
�Ñ��x�������(bi��o)ϵ���O(sh��)�����\(y��n)���ٶȺ��c(di��n)��(d��ng)�I���Ɍ�(du��)�C(j��)�����M(j��n)���ք�(d��ng)�����ˡ�
���ք�(d��ng)����ǰ����Ҫע���_���ŷ����o���c(di��n)��(d��ng)�r(sh��)����Ҫ��ס�։��_�P(gu��n)��
�։��_�P(gu��n)�֞�3 �n���ϙn���Йn�Լ��n������ֻ��̎���Йn�r(sh��)�����l�ŕ�(hu��)���_��
4.4 ��B(t��i)�_�J(r��n)
���ք�(d��ng)�������^���Ϸ���B(t��i)�ڣ���D4.4 ��ʾ���^�����B(t��i)��Ϣ��
�ք�(d��ng)���ˠ�B(t��i)��Ϣ�@ʾ��(d��ng)ǰ��̎�Ľ��������(qu��n)���@ʾ��16��
��(b��o)�������(xi��ng)�����^�쮔(d��ng)ǰ�Ƿ���ڈ�(b��o)����������ڈ�(b��o)�����t��(d��ng)ǰ�(xi��ng)�ɫ��tɫ������ϵ�y(t��ng)�@ʾ�^(q��)�Ј�(b��o)����Ϣ��(n��i)�ݡ�
�ŷ���r
1�� �ŷ��P(gu��n)���ŷ�δ��늕r(sh��)Motion ��B(t��i)���硣
2�� �ŷ��_���ŷ�����늕r(sh��)Motion ��B(t��i)���ɫ��Gɫ��
�ٶȣ���B(t��i)�����@ʾ��(d��ng)ǰ�ٶȰٷֱȡ�
4.5 λ�Ô�(sh��)��(j��)
�C(j��)����λ�Ô�(sh��)��(j��)�����C(j��)���˵�λ�ú��ˑB(t��i)��ʾ�̙C(j��)���˕r(sh��)��λ�Ô�(sh��)��(j��)��ͬ�r(sh��)ӛ䛴������
λ�Ô�(sh��)��(j��)�ЃɷN��ͣ�
1�� һ�N�Ǹ��S�������c(di��n)�ĽǶ�ƫ������ꇣ�
2�� һ�N�ǻ��ڵѿ�������(bi��o)ϵ�Ĺ���λ�ú��ˑB(t��i)������(bi��o)��ꇡ�
�P(gu��n)������(bi��o)ϵ��Ԕ��(x��)��B�� Ո(q��ng)����2.6�¹�(ji��)���P(gu��n)�ڔ�(sh��)��(j��)�����ă�(n��i)�ݣ� �ں��m(x��)�¹�(ji��)�н�BHR20-1700-C10ϵ�ЙC(j��)�����Ѓɂ�(g��)�����@ʾλ�Ô�(sh��)��(j��)��
һ�N���ք�(d��ng)�����λ�Ô�(sh��)��(j��)��D4.5��ʾ����ʼ���水ʾ�̺��ϵ�“MOVE”�I���M(j��n)���ք�(d��ng)���棬�ք�(d��ng)�������@ʾ��λ�Ô�(sh��)��(j��)��C(j��)���ˮ�(d��ng)ǰλ�õČ�(sh��)�r(sh��)��(sh��)��(j��)�����У�
1�� A1—A6 ����S�Ƕ�����(bi��o)ֵ��
2�� X��Y��Z��A��B��C����������(bi��o)ϵ������(bi��o)ֵ��

�D4.5 ��������(bi��o)ϵ�@ʾ����

�D4.6 �P(gu��n)��(ji��)����(bi��o)ϵ�@ʾ����